![]()
Strömungsgeschwindigkeit
Messprinzip
Die berührungslose Messung der Strömungsgeschwindigkeit basiert auf dem Prinzip des Doppler-Effekts. Der integrierte Geschwindigkeitssensor sendet ein Signal mit konstanter Frequenz in einem bestimmten Winkel zur Wasseroberfläche (siehe Abbildung 3). Dort wird das Signal reflektiert und aufgrund der Bewegung des Wassers in der Frequenz verschoben. Das reflektierte Signal wird von der Antenne des integrierten Geschwindigkeitssensors empfangen. Indem die ausgesandte Frequenz mit der Frequenz des von der Wasseroberfläche reflektierten Signals verglichen wird, kann die lokale Geschwindigkeit bestimmt werden.
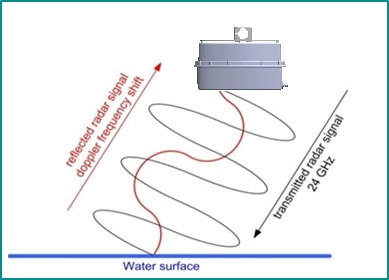
Abbildung 3 Prinzip der Geschwindigkeitsmessung
Trennung der Strömungsrichtung
Wasser kann entweder zum Geschwindigkeitssensor hin oder von diesem weg fließen. Je nach Strömungsrichtung kommt es zu einer Frequenzverschiebung zu höheren oder niedrigeren Frequenzen. Dieser Umstand ermöglicht dem SQ‑R Sensor, die Wasserbewegungen nach ihren Richtungen zu trennen und die entsprechende Geschwindigkeitsverteilung getrennt auszuwerten.
Messung des Neigungswinkels
Da der SQ‑R-Sensor in einem bestimmten Winkel zur Wasseroberfläche ausgerichtet ist, muss eine Winkelkorrektur durchgeführt werden. Der SQ‑R misst seine vertikale Neigung mit einem internen Sensor und führt eine automatische Winkelkorrektur durch.
Zustand der Wasseroberfläche
Die Wasseroberfläche muss sich deutlich bewegen und eine minimale Wellenbewegung aufweisen, um eine wahrnehmbare Doppler-Frequenzverschiebung zu messen. Je welliger die Wasseroberfläche und je höher die Strömungsgeschwindigkeit ist, desto zuverlässiger sind die Messungen. Die minimale Wellenhöhe für eine gültige Analyse beträgt je nach verwendeter Frequenz ca. 2 mm. Für sehr langsam fließende Flüsse kann diese Anforderung möglicherweise nicht erfüllt werden und eine kontinuierliche und korrekte Geschwindigkeitsmessung kann nicht garantiert werden.